基型控制器
核心电路元件:运算放大器
基本概述
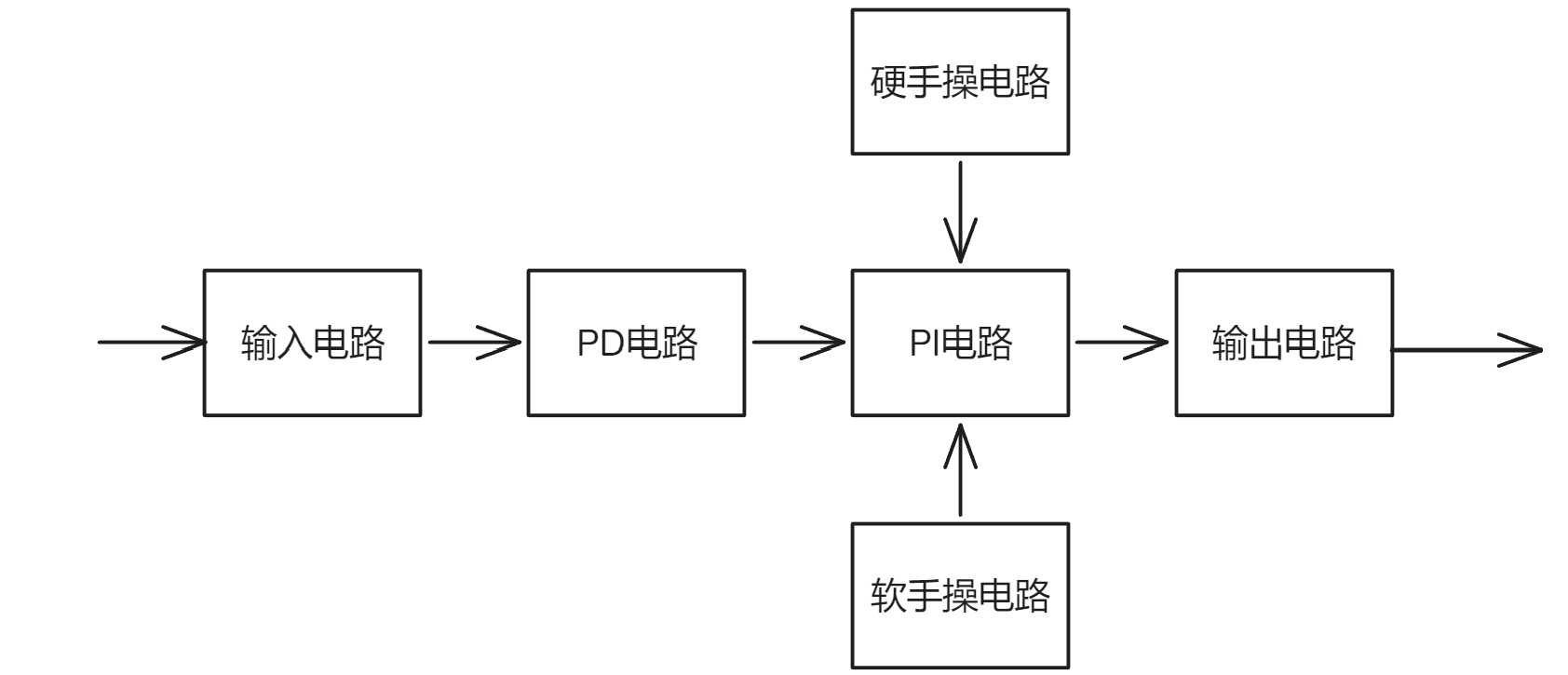
基型控制器:DDZ-Ⅲ型控制器对来自变送器 1~5V 直流电压信号与给定值相比较,产生偏差进行 PID 运算,输出 1-5V 或 4~20mA 的直流控制信号。
- 内、外给定切换功能:
内给定信号:定值控制,1-5V 直流电压
外给定信号:随动控制,4-20mA 直流电流 - 自动切换功能:“自动”、“软手操”、“硬手操”和“保持”四种
- 正、反作用切换功能:可以改变调节器的增益极性,即切换调节器的正、反作用。
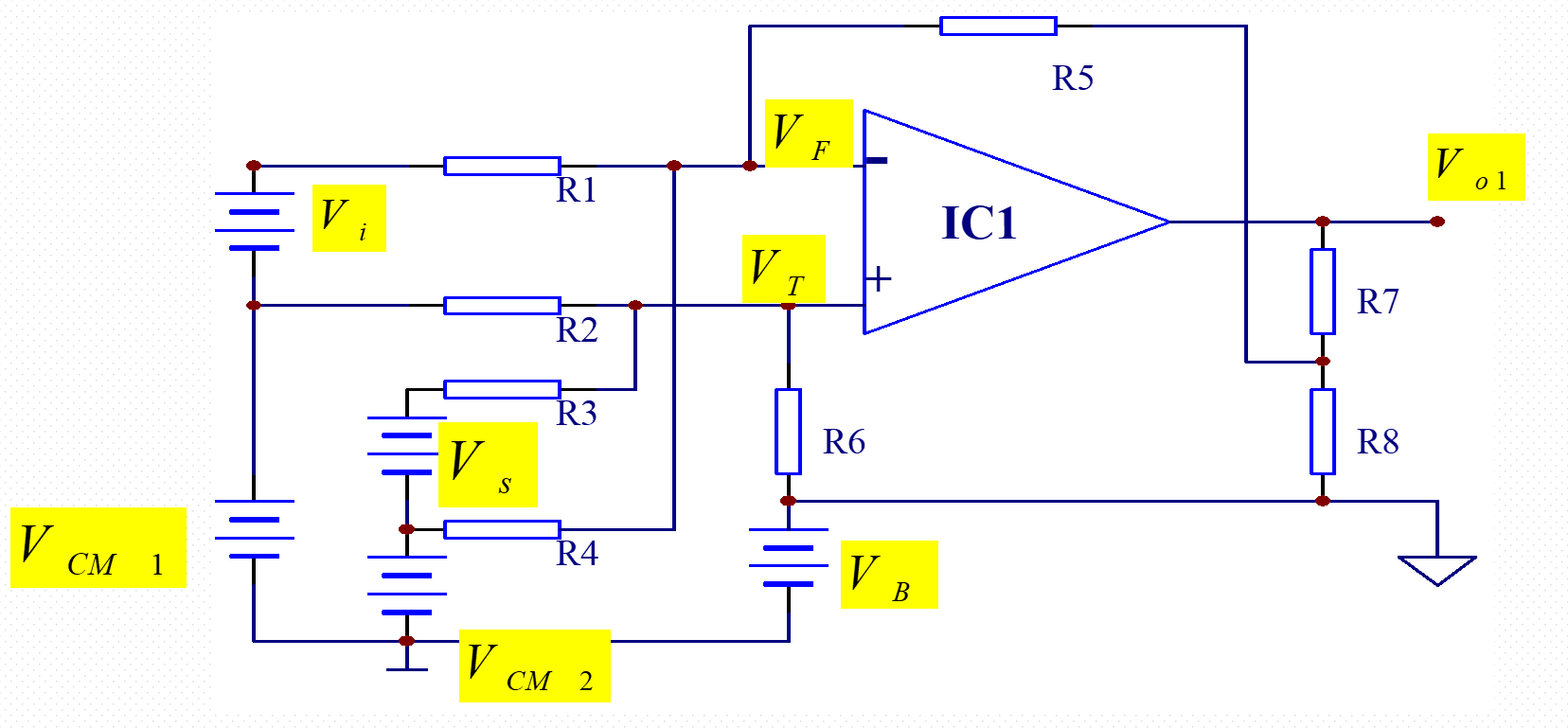
一、输入电路
偏差差动电平移动电路
偏差差动:消除集中供电引入的误差。将测量信号和给定信号相减,得到偏差信号,再将偏差信号放大两倍输出。差动放大器对共模信号有很强的抑制能力,可以消除导线电阻压降的影响。
电平移动:使集成运算放大器工作在允许的共模输入电压范围内。将 0V 为基准的输入信号转换为 10V 为基准的输出信号。
(基准为0V 变化范围为 1~5V 变为: 基准为 10V 变化范围为 0~
虚断:
虚短:电压相等
得到:
二、PID 电路构成
2.1 PD 电路
PD 电路对输入电路的输出进行比例微分(PD)运算,其输出信号作为比例积分(PI)电路的输入信号。
- 输入信号先经过一个无源的比例微分网络,进行微分运算;
- 再送至运算放大器的同相端,对信号进行比例运算。
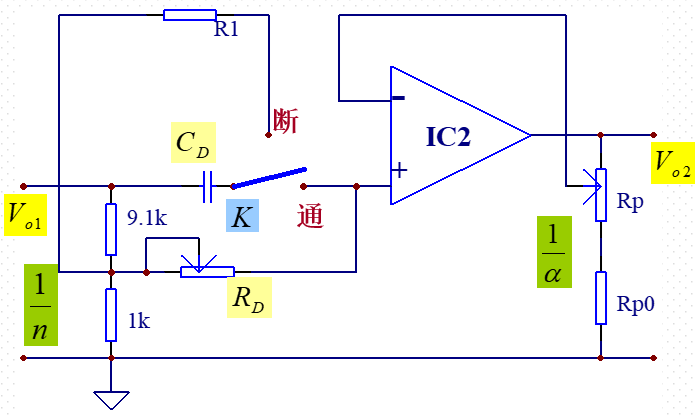
为滑动变阻器,可以通过调节 阻值来调节微分时间, 调节 阻值来调节比例度 - 开关的通断可以选择是否有微分作用:通时,有微分作用;断时,去除微分作用
稳态时,当开关处于断的位置,电容通过 接到 上,所以电容压降为
当开关处于通的位置时,电容与 的电阻压降恰好相等,接通微分作用的输出不会发生突变,不会产生扰动作用。
2.2 PI 电路
PI电路对PD电路的输出进行比例积分(PI)运算,其输出信号
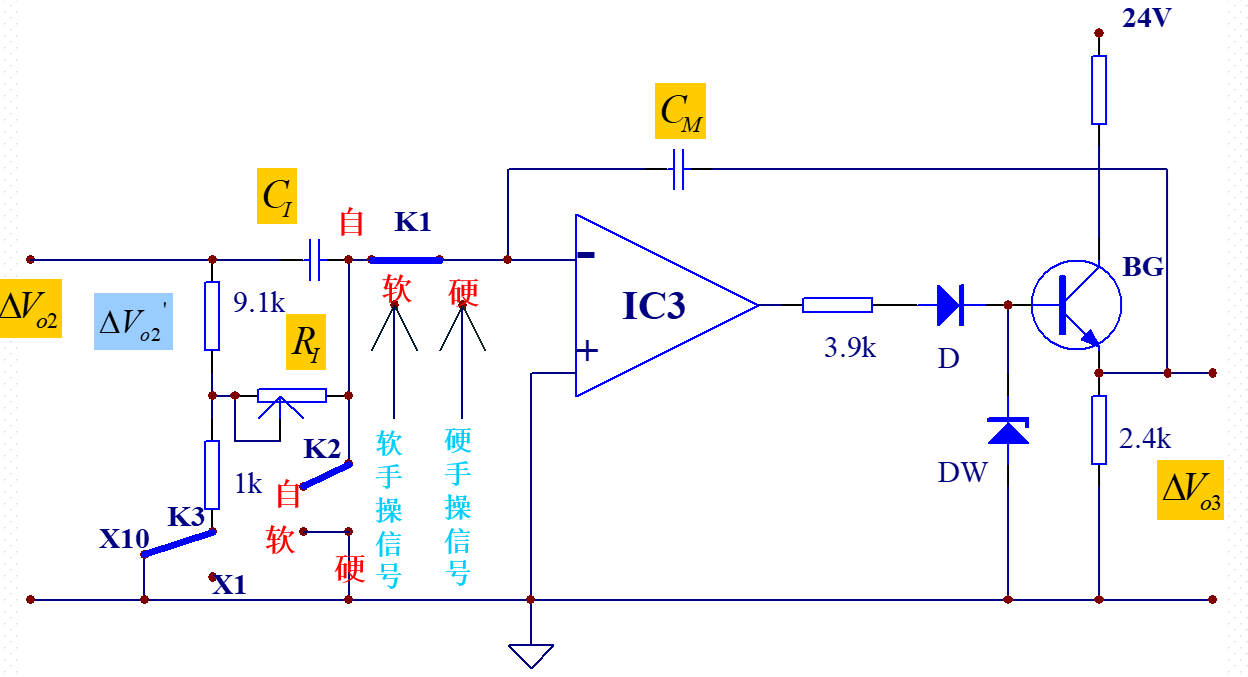
- 比例输入信号
,积分换挡器选择积分系数,得到积分输入信号 - 接收手动操作电路的信号,选择模式
积分饱和问题:只要输入信号
解决关键:一旦输出被限制,可以设法停止对电容按原方向充放电。
3. 基型控制器的 PID 传递函数
控制精度:
模拟式PID控制器#2.2 实际 PI 控制器
理想的积分项,实际的微分项
注意:积分部分
三、输出电路
将 PID 电路输出的以
四、手动操作电路
无平衡无扰动切换:
- 无平衡指的是无须事先调整到平衡状态,可以随时切换
- 无扰动指的是切换瞬间,控制器的输出不发生变化,对生产过程无扰动
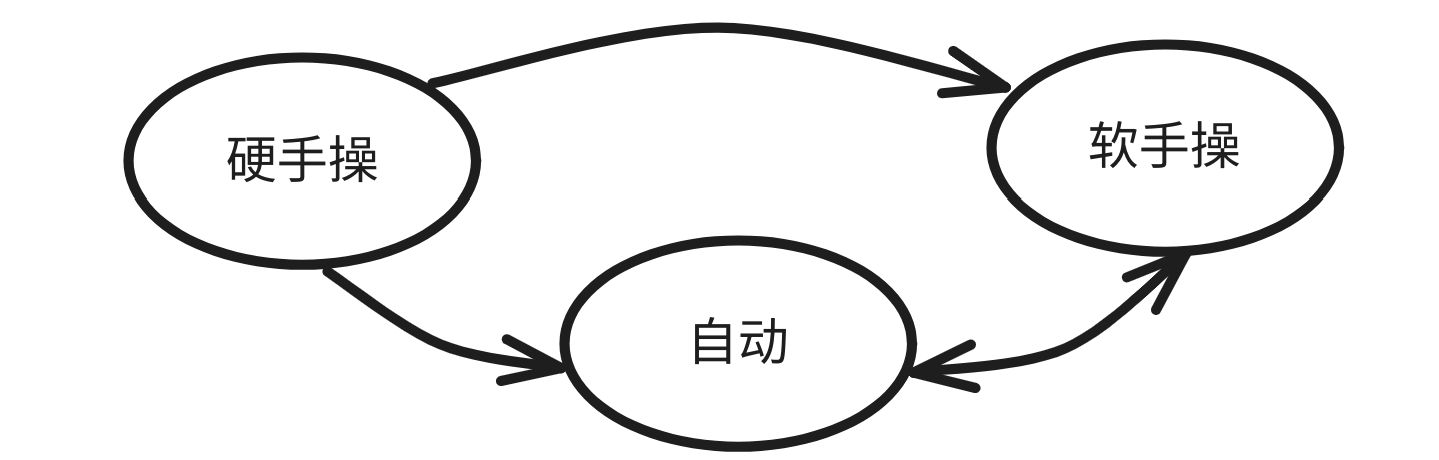
自动
硬手操:能使控制器的输出迅速地改变到需要的数值
软手操:可调节控制器处于保持状态、改变输出电流输出速度(加快或减慢)
自动到软手操:电路具有保持性
软手操到自动:输入电容
五、指示电路
电压-电流转换器
偏差差动电平移动电路